

1986년 보쉬가 만든 자동차용 통신방법론으로 국제표준기구 ISO-11898에서 정의되고 요즘 자동차에 있어서는 ‘반드시’라고 할 정도로 널리 쓰이고 있다. CAN(Closed Area Network)의 물리적 실체는 CAN_High, CAN_Low 와이어들과 개별장치 안에 들어 있는 CAN 프로토콜 처리기(IC소자 내지 프로그램 덩어리) 두 가지뿐이다.
작동에 있어서는 통신내용을 의미하는 메시지 안에 송신장치(From)와 수신장치(to) 그리고 송신장치가 전달하고자 하는 데이터를 묶고 통신라인으로 흘려보내면 수신장치들은 자신의 ID에 해당하는지 여부를 스스로 판단하고 데이터를 받아 적절히 처리한다. 이 전송과 수신행위는 CAN 통신라인에 묶인 다양한 장치들(Node라고 함)이 언제라도 필요할 때 실행할 수 있는 것으로 각 Node 장치로는 엔진제어기, 전장제어기, 제동제어기 외 분리 독립되어 작동되는 모든 것들이 가능하다.
특히, 아래 예시와 같이 단일한 선로(Common BUS)에 여러 장치를 접속, 의사소통 통로를 공유하는 것이므로 사용되는 와이어의 수와 길이를 줄이고 결국 자동차의 총 중량도 줄일 수 있다.
(출처 : http://www.ni.com/)
한편, CAN BUS에서는 두 와이어를 꼬아서(twisted) 주변 전자기잡음으로 부터 메시지를 보호한다. 임의의 전자기장이 발생했을 때 꼬여있는 와이어가 ‘동시에 영향을 받으므로’ 둘 사이 전압차(差)는 0V이고 신호로 인지될 수 있는 것이 없으면 결국 잡음원의 영향도 없는 셈이다.
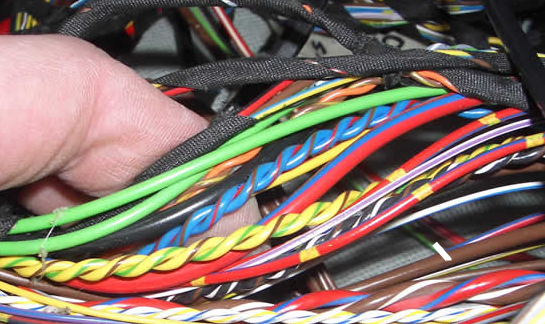
(출처 : http://www.autobionics.co.uk/)
박태수 motordicdaser@daum.net